

توضیحات کامل پیرامون انواع سینکروها
توضیحات کامل پیرامون انواع سینکروها
انواع سینکروها
سینکروهای گشتاوری
سینکروهای فرستنده
سینکروهای گیرنده
سینکروهای تفاضلی
سینکروهای کنترلی
سینکرو کنترلی فرستنده (CX)
سینکرو کنترلی تفاضلی (CDX)
سینکرو کنترلی ترانسفورمر (CT)
نکاتی در مورد تقسیمبندی سینکروها
بنا به نوع بـار متـصل بـه سـینکروها آن هـا را بـه دو گـروه عمـده سـینکروهای گـشتاوری و
سینکروهای کنترلی تقسیمبندی میکنند.
سیستمهای گشتاوری جهت موقعیـت بارهـای سـبک از جملـه اشـاره گرهـا، شـماره گیرهـا و
نشانگرهای مشابه به کار می روند و از سیـستم هـای کنترلـی بـرای حرکـت بارهـای سـنگین ماننـد
هدایتکنندههای اسلحه، آنتنها، پرتابکننده موشک و… استفاده میشود.
علاوه بر دسته بندی کلی، سینکروها را میتوان به هفت گروه تقسیم نمود که در جـدول شـماره ی 1
آمده است.
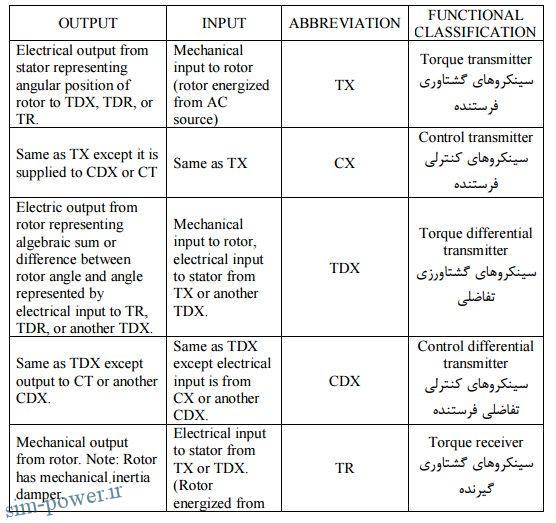

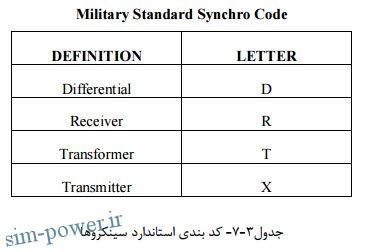
که در این جدول از کدبندی نظامی استاندارد مطابق جدول زیر استفاده شده است.
سینکروهای گشتاوری
به طور کلی میتوان سینکروهای گشتاوری را به سه گروه تقسیمبندی نمود:
سنکروهای فرستنده
سینکروهای گیرنده
سینکروهای تفاضلی
سینکروهای فرستنده و گیرنده
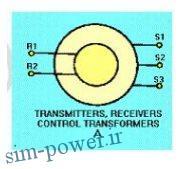
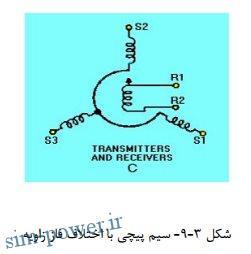
سینکروهای فرستند ه و گیرنده دارای ساختمان مشابه یکدیگر می باشند بدین ترتیب که هـر
دو آن ها دارای یک سیم پیچی در روتور و یک سیم پیچی سهفاز (سه سـیم پیچـی ) در اسـتاتور خـود
میباشند. اما از لحاظ عملکرد، عکس یکدیگر عمل می نمایند. کاربرد سیستمهای فرستنده- گیرنـده
در انتقال اطلاعات زاویه از یک نقطه به نقطه دیگر بدون استفاده از اتصالات مکانیکی می باشد، دقت
در این سیستم در حالت گشتاور 30 دقیقه و در حالت کنترلی 10 دقیقه مـی باشـد . ضـمناً مـی تـوان
موقعیت روتور فرستنده را به چندین نقطه متفـاوت منتقـل نمـود کـه بـرای اینکـار از سـینکروهای
گیرنده به صورت موازی استفاده میشود که البته این امر باعث کاهش دقـت شـده و نیـاز بـه منبـع
تغذیه با قدرت بالاتری خواهیم داشت.
سینکروهای فرستنده
در این سینکروها که نام دیگر آن ها سینکرو ژنراتورها می باشد، چـرخش روتـور باعـث ایجـاد
ولتاژ در استاتور می گردد و بدین ترتیب خروجی سیستم، سه ولتاژ متناوب متناسب با زاویه روتور و
استاتور می باشد که این ولتاژها با یکدیگر، 120 اختلاف فاز خواهند داشت که ولتاژهای ایجـاد شـده
یا دقیقاً هم فاز با ولتاژ مرجـع بـوده و یـا 180 بـا ولتـاژ مرجـع اخـتلاف فـاز دارنـد (بنـا بـه جهـت
سیمپیچی)
سینکروهای گیرنده
این سینکروها که به سینکرو موتورها معروفند دارای خروجی مکانیکی می باشـند . سـاختمان
این سینکروها کاملاً مشابه نوع فرستنده ها میباشد، اما عملکرد آنها عکس آنها است، یعنی بـه ازای
تغییرات ولتاژ استات ور، روتور آن ها در موقعیت های مختلف قرار می گیرد. معمولاً سینکروهای گیرنده
همراه سینکروهای فرستنده مورد استفاده قرار می گیرند. بدین صورت که سـیم پیچـی هـای متنـاظر
آنها به یکدیگر متصل می گردد. (سیمپیچیهای روتور آنها به یکدیگر و سـیم پیچـی هـای اسـتاتور
آنها نیز نظیر به یکدیگر وصل میشوند.)
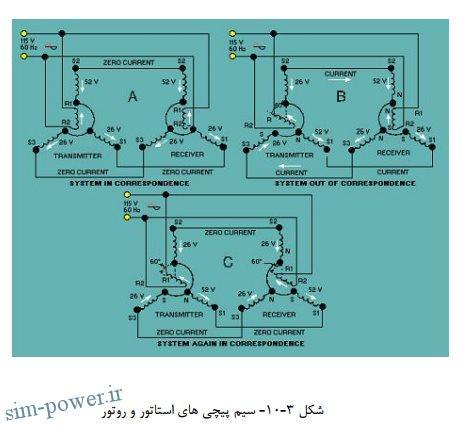
حال اگر روتور سینکرو فرستنده در یک زاویه دلخواه q قرار گیـرد، اخـتلاف پتانـسیلی میـان
استاتورهای سینکرو فرستنده و گیرنده متناسب با زاویه روتورهـای آن هـا ایجـاد خواهـد شـد . ایـن
اختلاف پتانس یل باعث ایجاد جریان در استاتور سـینکرو گیرنـده مـی شـود . گـشتاور حاصـل از ایـن
جریان باعث چرخش روتور سینکرو گیرنده می شود. گشتاور حاصل به گونـه ای اسـت کـه بـا عامـل
بوجود آورنده خود مخالفت مینماید.
بدین ترتیب روتور سینکرو گیرنده آنقدر می چرخد تا در راستای روتور گیرنده قـرار گیـرد . در
این حالت ولتاژ استاتورهای سینکرو فرستنده و گیرنده با هم یکسان شده در نتیجه جریـان عبـوری
از آن ها صفر خواهد شد و روتور گیرنده از حرکت باز خواهد ایـستاد و بـدین ترتیـب همـواره روتـور
سینکرو گیرنده، وضعیت روتور فرستنده را تعقیب خواهد نمود.
با توج ه به اصطکاک ناشی از جاروبـک هـا و اصـطکاک هـای داخلـی، عمـل تعقیـب موقعیـت
همزمان صورت نگرفته لذا سیستم تاخیر خواهد داشت کـه بـرای رفـع ایـن مـشکل از سـینکروهای
بدون جاروبک استفاده میشود.

با توجه به این که سینکروهای گیرنـده بایـد فر سـتنده را تعقیـب کننـد، بـه گونـه ای سـاخته
میشوند که لرزش و فراجهش آن ها به حداقل برسد . برای کـاهش نوسـانات روتـور گیرنـده، از یـک
دمپر استفاده میشود که این دمپر معمولاً به صورت یک چرخ لنگر برنجی میباشد.
زمان تغییر وضعیت روتـور فرسـتنده تـا رسـیدن بـه موقعیـت جدیـد را زمـان damping یـا
همزمانی گویند . این زمان به ابعاد سینکرو گیرنده، خصوصیات فیزیکی بار متـصل بـه آن و سیـستم
گشتاور بستگی دارد و می توان با ملاحظاتی کـه در طراحـی سیـستم بایـد رعایـت شـود و انتخـاب
ساختار مناسب برای گیرندهی آن را کاهش داد.
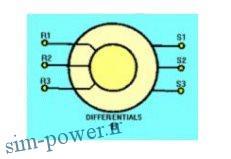
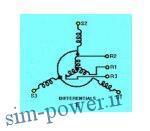
سینکروهای تفاضلی
این سینکرو که تفاضل یا مجمـوع زاویـه میـان سـینکرو گیرنـده و فرسـتنده را انـدازه گیـری
میکند، جهت تعیین میزان خطا بین موقعیت ارسالی سینکرو گیرنده و موقعیت فرستنده می باشـد .
یکی از کاربردهای این سینکرو در سیـستم نظـامی آن اسـت کـه یکـی از ورودی هـای آن موقعیـت
مطلوب تفنگ و ورودی دیگر موقعیت واقعی تفنگ میباشد.
 قسمت اول آموزش متلب.
قسمت اول آموزش متلب.