فروش مقاله شبیه سازی شده پردازش موازی ژنتیک و فازی
دانلود رایگان مقاله Expert Systems with Applications
گزارش کار
داده کاوی برای القای قوانین متناظر با داده های تراکنشی مورد توجه قرار گرفته است. در این بررسی از الگوریتم داده کاوی فازی برای به دست اوردن قوانین متناسب و توابع اعضا استفاده شده است. یک بستر بر اساس GA برای یافتن نمونه بهینه مساله ایجاد شد. تطابق و انتخاب بهترین دسته کرومزوم بر اساس تعداد ایتم های بزرگ ایجاد شده از قسمت داده کاوی فازی و با تعیین اثر تناسب صورت می گیرد.
بستر مطرح شده یک جمعیت از مجموعه توابع اعضا دراد، و به طور خودکار از الگوریتم ژنتیک برای به دست اوردن نتایج استفاده می کند. ابتدا هر مجموعه از توابع اعضا را در یک رشته به طول ثابت می برد. سپس رشته مناسب را برای جهش انتخاب می کند تا نتاج های خوب را برای تابع اعضا به دست بیاورد. تابع اعضای نتاج تحت تکامل قرار گرفته و این روند تا زمانی که بهترین تابع اعضا حاصل شود ادامه می یابد.

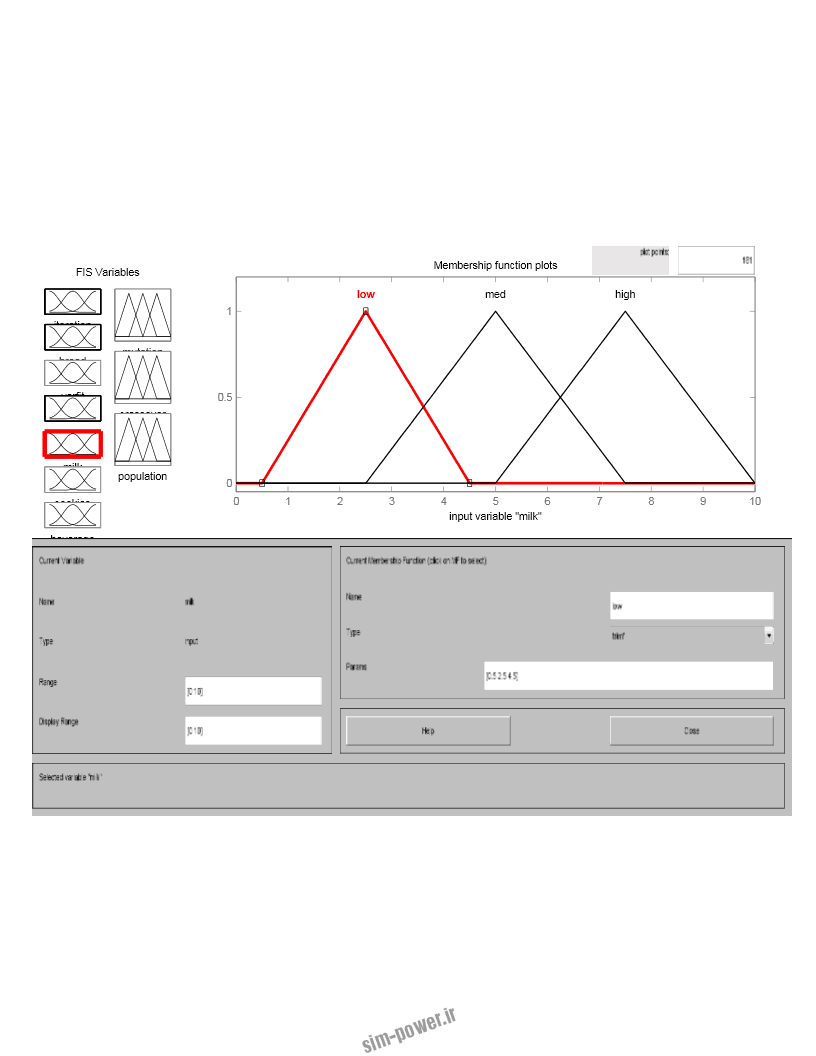
تابع اعضای اعمالی به قوانین فازی به صورت توابع مثلثی در نظر گرفته می شود (شکل 1.). برای به دست اوردن انطباق و انتخاب مناسب از پارامتر های نرخ همپوشانی و نرخ پوشش استفاده می شود. نرخ همپوشانی به این صورت تعریف می شود:
که عبارت از طول همپوشانی بخش بر حداقل نیم دامنه فاصله از مرکز تابع مثلثی می باشد. همچنین میزان پوشش نیز از رابطه زیر به دست می اید:
حداکثر مقدار Ij در تراکنش می باشد.
- اپراتور ژنتیک
اپراتور های ژنتیک در موفقیت الگوریتم ژنتیک نقش به سزایی دارد. اپراتور های مختلف برای کاربرد های مختلف بیان شده است.
2.1 یک مثال
فرض کنید بعد از چند نسل یک کروموزوم دید ایجاد شده باشد (شکل 2.).

شکل 2. کارکرد جهش.
الگوریتم داده کاوی
با توجه به داده کاوی بر اساس الگوریتم فازی و ژنتیک ورودی و خروجی های سیستم به صورت زیر مشخص می شود.
ورودی: داده های تراکنش n، مجموعه ایتم های m، استانه حمایتی و استانه اطمینان .
خروجی: مجموعه قوانین فازی و توابع اعضای متناظر با ان.
گام 1. به طور تصادفی افراد جمعیت P تولید می شود.
گام 2. هر مجموعه توسط یک تابع اعضا بازیابی می شود.
گام 3. مقدار انطباق برای هر کروموزوم مطابق زیر گام های زیر محاسبه می شود:
گام 3.1. مقدار انتقال با توجه به فرمول زیر به دست می اید:
گام 3.2. برای هر رژیم مقدار عدد اصلی تراکنش را به دست می اوریم:
گام 3.3. با توجه به مقدار استانه حمایتی بزرگی count را بررسی می کنیم.
گام 3.4 مقدار انطباق را برای کروموزوم تعیین می کنیم.
گام 4. Crossover را در جمعیت پیاده می کنیم.
گام 5. جهش را در جمعیت پیاده می کنیم.
گام 6. برای نسل بعد با ملاک انتخاب افراد را انتخاب می کنیم.
گام 7. در صورتی که معیار تراکنش ارضا نشود به گام 3 برو، در غیر این صورت به گام بعد برو.
گام 8. تابع اعضا را با بیشترین مقدار انطباق به عنوان خروجی به دست می اید.
به عنوان یک مثال چهار ایتم milk, bread, cookies و beverage را در نظر بگیرید. جدول 1. مقادیر count را برای رژیم های مختلف فازی نشان می دهد.
جدول 1. Count برای مناطق مختلف فازی.
| Count |
Item |
Count |
Item |
| 1.054
|
cookies.Low |
0.8139 |
milk.Low |
| 0.72 |
cookies.Middle |
0.4126 |
milk.Middle |
| 1.02 |
cookies.High |
0.5821 |
milk.High |
| 0.8492 |
beverage.Low |
0.6767 |
bread.Low |
| 0.7492 |
beverage.Middle |
1.1904 |
bread.Middle |
| 0.8844 |
beverage.High |
1.8344 |
bread.High |
در گام بعدی با توجه به روابط مذکور میزان انطباق را محاسبه می کنیم. نتایج در جدول 2. برای انطباق کروموزوم در جمعیت ورودی نشان داده شده است.
جدول 2. بخشی از مقادیر انطباق را برای کروموزوم در جمعیت ورودی
| f |
Chromosome |
F |
Chromosome |
| 1.2528 |
C40 |
0.75 |
C1 |
| 0.4756 |
C41 |
0.48 |
C2 |
| 0.0873 |
C42 |
0.004 |
C3 |
| 0.246 |
C43 |
0.0044 |
C4 |
| 2 |
C44 |
0.5789 |
C5 |
| 0.05 |
C45 |
0.3398 |
C6 |
| 0.445 |
C46 |
2 |
C7 |
پس از اجرای الگوریتم نتایج به دست امده برای توابع اعضای فازی به شرح زیر است:

شکل 3. نمودار عضویت به دست امده برای Bread.
میزان نتایج حاصل از الگوریتم ژنتیک نیز در نمودار شکل 7. نشان داده شده است.

شکل 7. میزان میانگین مقادیر انطباقی به دست امده از الگوریتم ژنتیک.
توضیحات تکمیلی
نحوه اجرای برنامه
برای اینکه برنامه اجرا شود ابتدا فایل ها را در پوشه مناسبی از حالت فشرده خارج کرده و سپس فایل FGA.m را اجرا نمایید. فایل های کمکی که برای اجرای این فایل لازم است عبارت است از فایل MyCrossOver_Fcn که تابع crossover را مشخص می نماید. فایل SelectParents_Fcn که برای ایجاد نسل جدید استفاده شده و قسمت Mution در قسمت مربوطه نوشته شده است.
در قسمت ابتداییی کد نوشته شده در فایل FGA.m الگوریتم فازی فراخوانی می شود. الگوریتم برای مثال موجود در مقاله می باشد و هر گونه تغییر در ورودی های فازی باید تغییرات متناسب را در قسمت های مختلف از جمله فایل اصلی و فایل مربوط به crossover داشته باشد. نحوه محاسبه و اعمال crossover و انطباق (fitting) در قسمت قبل توضیح داده شد.





































 ترکیب رشته های خانه آرایه
ترکیب رشته های خانه آرایه